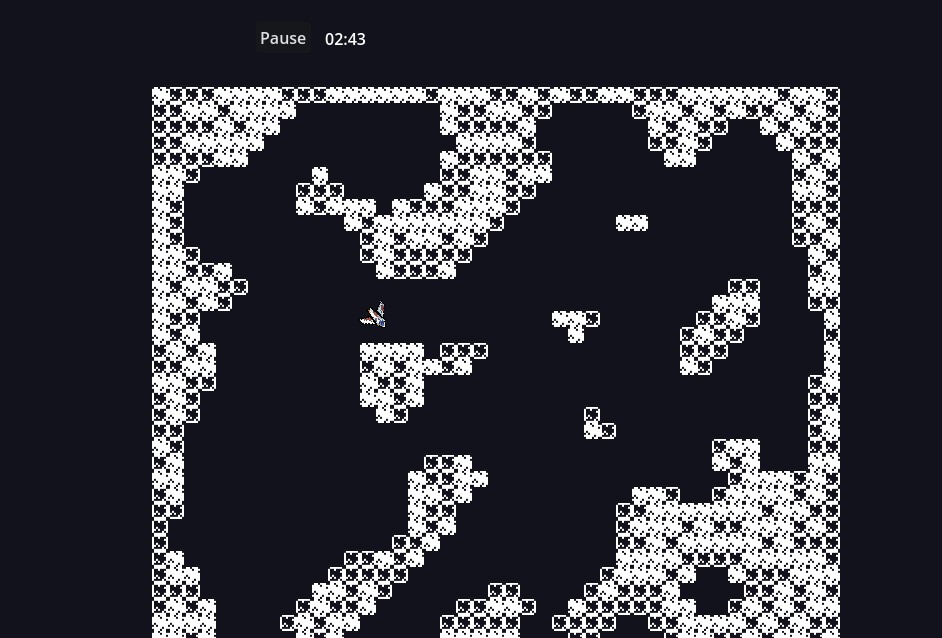
This tutorial will teach you how to create a procedural cave generation system in Godot that guarantees a path between start and end points. The system uses a combination of random generation, cellular automata for smoothing, and pathfinding using A-star to ensure playability. I used this map in my 2D spaceship tutorial.
Prerequisites: Basic understanding of GDScript, Godot 4.x, a tileset with at least one wall tile.
Project Setup
- Create a new Godot project
- Create a new scene with a TileMap node as the root
- Set up a basic tileset with at least one wall tile
- Attach a new script to the TileMap
Basic Structure and Configuration
First, let’s set up variables and constants. Add this code at the top of your script:
extends TileMap
# Configuration parameters
@export var fill_percent := 45 # Initial random fill percentage
@export var smoothing_iterations := 4 # How many times to smooth the cave
@export var min_cave_size := 50 # Minimum size of cave regions to keep
@export var room_radius := 4 # Radius of open spaces around start/end
# Map settings
@export var map_width := 40
@export var map_height := 40
@export var max_generation_attempts := 16 # Maximum attempts to generate a valid map
@export var should_be_closed := true
# Tile IDs
const WALL_TILE := 0
const EMPTY := -1
var _map := {} # Dictionary to store our map data
var _start_point: Vector2
var _end_point: Vector2
Main Generation Function
This is the primary function that starts the cave generation process:
func generate_level(start: Vector2, end: Vector2) -> void:
_start_point = start
_end_point = end
var attempt := 0
var valid_map := false
while !valid_map and attempt < max_generation_attempts:
attempt += 1
# Clear existing tiles
clear()
_map.clear()
# Generate a new map
_initialize_map(attempt) # Pass attempt as seed
# Smooth the map multiple times using cellular automata
for i in smoothing_iterations:
_smooth_map()
# Create rooms at start and end points
_create_room(_start_point, room_radius)
_create_room(_end_point, room_radius)
# Validate path existence
valid_map = _check_path_exists()
if !valid_map:
push_error("Failed to generate a valid map after %d attempts" % max_generation_attempts)
# Force walls on the map edges
if should_be_closed:
_force_walls()
# Apply the final map to tilemap
_apply_to_tilemap()
Above function calls _initialize_map(), _smooth_map() and other functions to generate map and process them in sequence. Finally, _apply_to_tilemap() is called to actually view the canges in TileMap.
Map Initialization
This function creates the initial random map:
func _initialize_map(seed_value: int) -> void:
seed(seed_value) # Set the random seed for reproducibility
for x in range(map_width):
for y in range(map_height):
var pos := Vector2(x, y)
# Fill edges with walls
if x == 0 || x == map_width - 1 || y == 0 || y == map_height - 1:
_map[pos] = true
else:
_map[pos] = randf() * 100 < fill_percent
Cellular Automata Smoothing
These functions handle the smoothing process using cellular automata rules:
func _smooth_map() -> void:
var new_map := {}
for x in range(map_width):
for y in range(map_height):
var pos := Vector2(x, y)
var wall_count := _get_surrounding_wall_count(pos)
# Apply cellular automata rules
if wall_count > 4:
new_map[pos] = true
elif wall_count < 4:
new_map[pos] = false
else:
new_map[pos] = _map[pos]
_map = new_map
func _get_surrounding_wall_count(pos: Vector2) -> int:
var wall_count := 0
for x in range(-1, 2):
for y in range(-1, 2):
var check_pos := Vector2(pos.x + x, pos.y + y)
if check_pos != pos:
if _map.get(check_pos, true): # Default to wall if outside bounds
wall_count += 1
return wall_count
For current cell, if more than4 of its neighbors are walls, then make it a wall. And if neighboring walls are less than 4 (meaning, fewer or no walls around itself), then make this too, empty.
To get wall-cells around current cell, we use indices of those cells, in loop. If current cell if (0, 0), then the cell above it will be (0, 1) and cell on right of it will be (1, 0), and so on for all other neighbors.
Room Creation
This function creates open areas at the start and end points:
func _create_room(center: Vector2, radius: int) -> void:
for x in range(-radius, radius + 1):
for y in range(-radius, radius + 1):
var pos := Vector2(center.x + x, center.y + y)
if pos.x >= 0 && pos.x < map_width && pos.y >= 0 && pos.y < map_height:
if Vector2(x, y).length() <= radius:
_map[pos] = false
Path Validation
These functions ensure there’s a valid path between start and end points. We use A* algorithm to confirm this:
func _check_path_exists() -> bool:
var astar := AStar2D.new()
# Add all empty points to AStar
for x in range(map_width):
for y in range(map_height):
var pos := Vector2(x, y)
if !_map[pos]: # If it's an empty space
var point_id := _get_point_id(pos)
astar.add_point(point_id, pos)
# Connect neighboring points
for x in range(map_width):
for y in range(map_height):
var pos := Vector2(x, y)
if !_map[pos]:
var point_id := _get_point_id(pos)
# Connect to orthogonal neighbors
for neighbor in [Vector2(1, 0), Vector2(-1, 0), Vector2(0, 1), Vector2(0, -1)]:
var next_pos :Vector2 = pos + neighbor
if _is_valid_empty_pos(next_pos):
var next_id := _get_point_id(next_pos)
if !astar.are_points_connected(point_id, next_id):
astar.connect_points(point_id, next_id)
# Check if path exists between start and end
var start_id := _get_point_id(_start_point)
var end_id := _get_point_id(_end_point)
return astar.has_point(start_id) && astar.has_point(end_id) && \
astar.get_point_path(start_id, end_id).size() > 0
func _is_valid_empty_pos(pos: Vector2) -> bool:
return pos.x >= 0 && pos.x < map_width && \
pos.y >= 0 && pos.y < map_height && \
!_map[pos]
func _get_point_id(pos: Vector2) -> int:
return int(pos.x + pos.y * map_width)
If path doesn’t exist between start/end points, i.e., if _check_path_exists() return false, then we re-start the entire process until we get the map in which the path exists (see above in generate_level() method).
Final Map Processing
These functions handle the final processing and application of the map:
func _force_walls() -> void:
if not should_be_closed:
return
# Create walls on top and bottom edges
for x in range(map_width):
_map[Vector2(x, 0)] = true # Top wall
_map[Vector2(x, map_height - 1)] = true # Bottom wall
# Create walls on left and right edges
for y in range(map_height):
_map[Vector2(0, y)] = true # Left wall
_map[Vector2(map_width - 1, y)] = true # Right wall
func _apply_to_tilemap() -> void:
for x in range(map_width):
for y in range(map_height):
var pos := Vector2(x, y)
if _map[pos]:
set_cell(0, pos, 0, Vector2i(0, randi_range(0, 1))) # Set wall tile
else:
set_cell(0, pos, -1) # Clear tile (empty space)
How to Use
@onready var tilemap = $TileMap
func _ready():
var start = Vector2(5, 5) # start point
var end = Vector2(35, 35) # end point
tilemap.generate_level(start, end)
I used a combination of, random initial generation, cellular automata for cave smoothing, A* pathfinding to make sure that start/end points connect, room creation.
The system will make multiple attempts to generate a valid map if necessary, ensuring there’s always a path between the start and end points.
Thank you for reading <3